FPGA USB3.0
CyperStereo 双目惯性 IMU 相机 VIO AI SLAM FPGA USB3.0
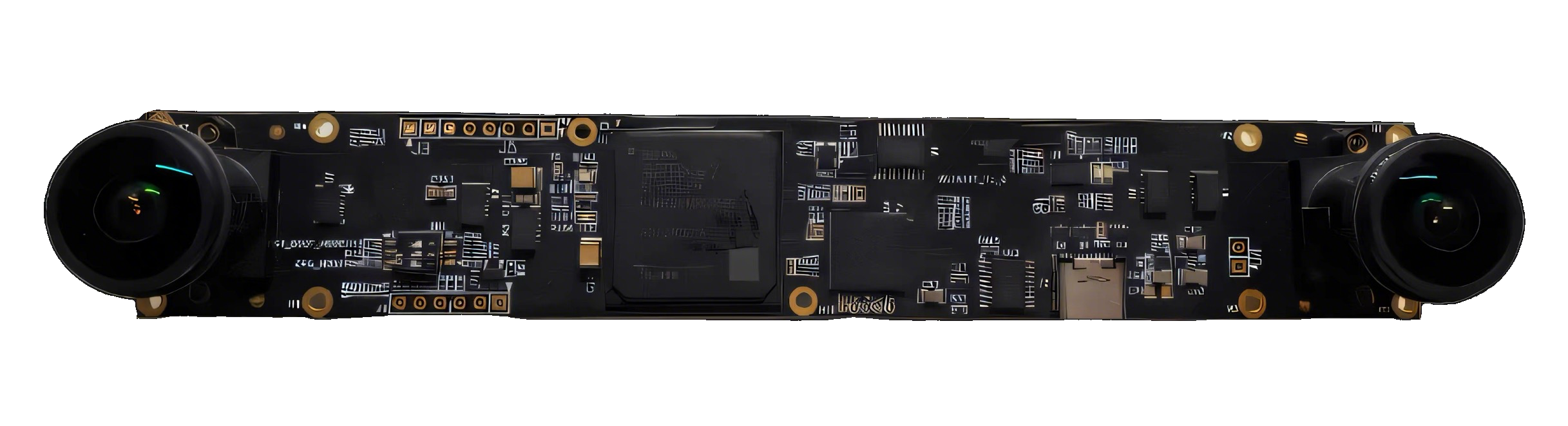
产品介绍
CyperStereo 设计时借鉴了 EuRoC 数据集采集设备 VI-Camera, 使用了 EuRoC 同款 sensor MT9V034, 基于此 Sensor 精调曝光增益参数, 搭配高质量大广角镜头, FOV 可达 160°, 能够适应于室内外各种复杂环境, 以及高速运动场景。同时选用了一颗高性能 IMU BMI088, 使用 FPGA 将多传感器时间硬件同步精度降低到 1ms 内, 极大提升了 SLAM 算法各项性能指标, 使用 ORBSLAM3 在室外空旷场景实测 300m, 回到起点误差几十 cm 左右, 里程计漂移误差在 0.1%-0.5%内。
核心特性
- FPGA 硬件时间同步,同步精度 < 1ms
- 大广角镜头,FOV 可达 160°
- 适应室内外各种复杂环境
- 支持高速运动场景
- ORBSLAM3 实测 300m,误差仅几十厘米
- 里程计漂移误差在 0.1%-0.5% 内
- 支持 VINS-Mono、VINS-Fusion、ORB_SLAM3 等开源项目
技术规格
图像传感器
MT9V034
IMU 传感器
BMI088
视场角 (FOV)
160°
时间同步精度
< 1ms
接口类型
USB 3.0
支持平台
Windows、Ubuntu、ROS、ROS2、rk3588、树莓派、orin、xavier